为了设计一枚角膜塑形镜,我们需要先假定一个目标模型眼,然后我们的塑形镜就放在这个模型眼的角膜上。
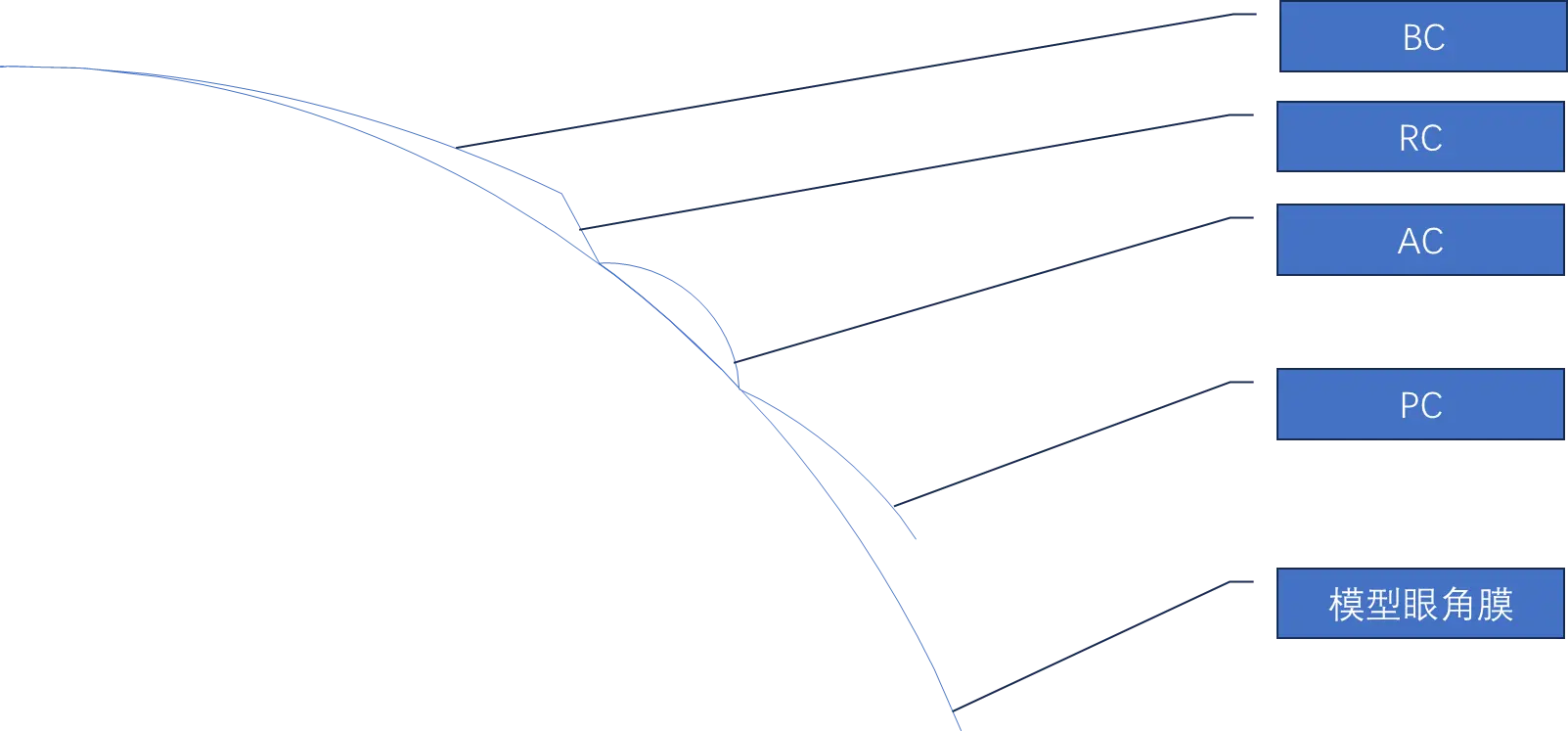
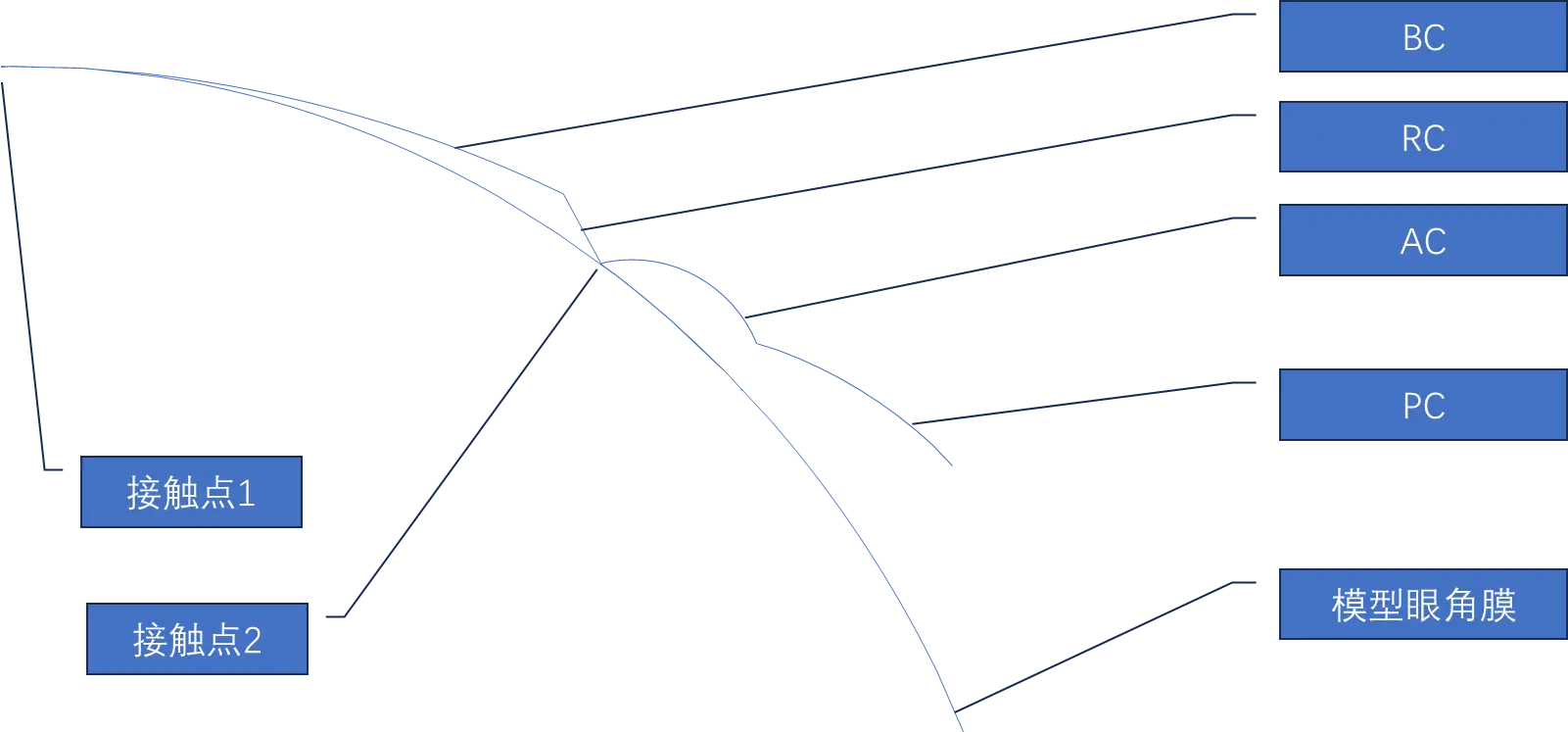
示意图1,画出半边模型眼角膜和塑形镜的4个弧段,AC故意画成了比较夸张的形态,实际不可能如此,因为按照之前的约定,AC弧的圆心是在镜片的对称轴上,图中这个AC的半径太小了。
按照眼科常见的模型,我们认为模型眼的角膜是一个轴对称的圆锥曲线形状,由两个参数决定:曲率半径R和圆锥系数Q值(当然也可以是e值,但我非常非常讨厌e)。
之前我们约定这个最简单的塑形镜是这样的结构:
- BC:圆弧
- RC:直线
- AC:圆弧
- PC:圆弧
所以塑形镜和角膜会有3个接触点:
- BC弧的起点,也就是塑形镜的中心,这里说“接触”不严谨,准确的说是非常靠近,一般需要塑形镜与角膜中心有~5um的间隙,但为了简单起见,我们可以先设定为接触,也就是间隙=0。为了矫正近视,BC弧的形态要比角膜更平坦一些,所以如果BC弧的起点和角膜是接触的,那么BC弧的终点一定是更加远离角膜了,不会再有接触。BC弧的终点就是RC弧的起点,于是RC弧的起点也不可能与角膜有接触。
- AC弧的起点,RC弧的终点也就是AC弧的起点,AC弧的目的就是为了让塑形镜在角膜能够保持稳定,所以AC弧的起点要与角膜接触。
- AC弧的终点,也应该与角膜接触,AC弧之内还有其他能够与角膜接触的点么?如果你能够画出一条圆锥曲线(角膜),不论它是圆、椭圆、抛物线还是双曲线,能够和另外一条圆弧(AC)有交点,那么在对称轴的一侧,最多只能有两个交点。
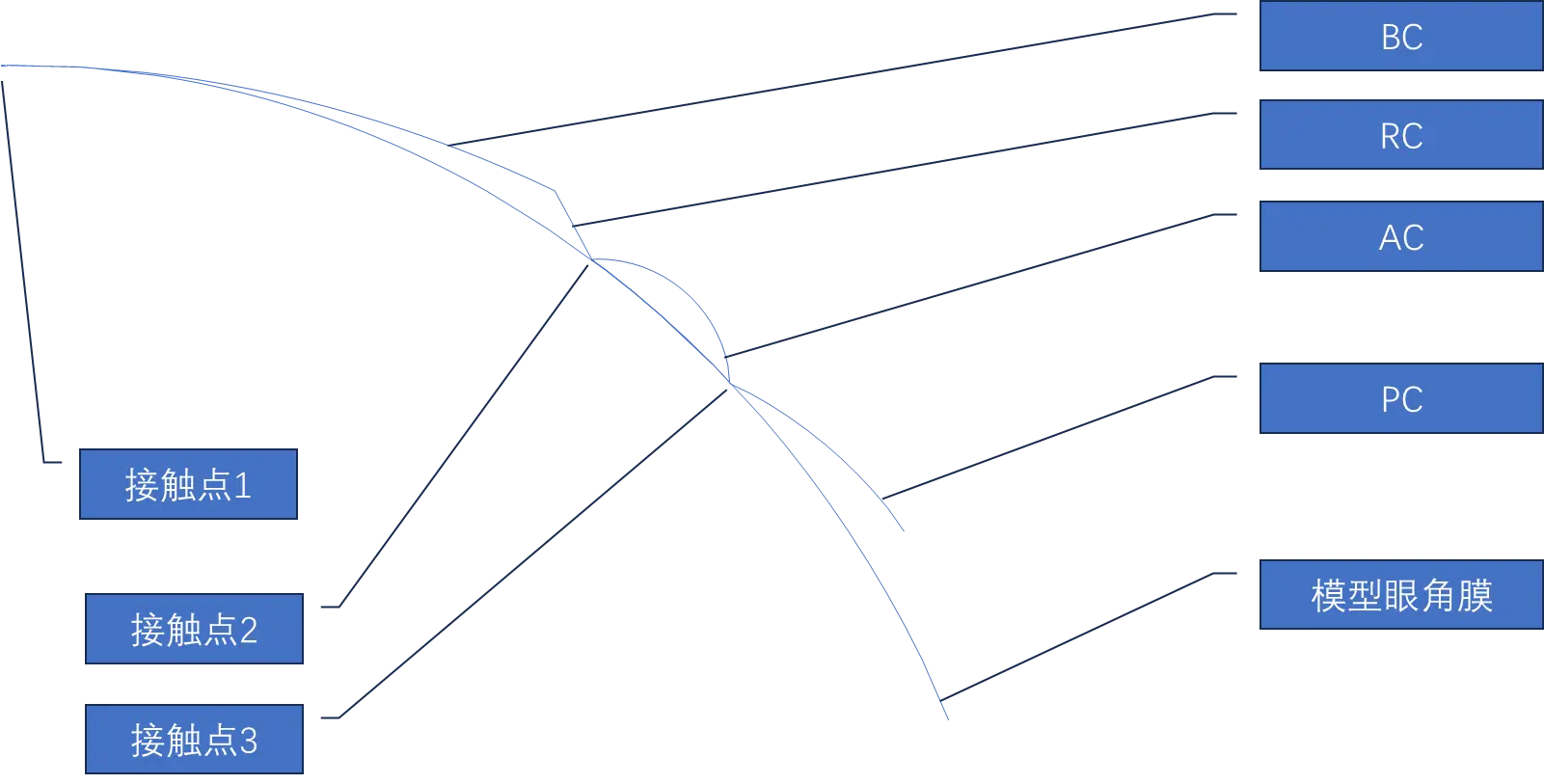
(说是接触点也不算严谨,BC与角膜是一个接触点,但AC弧是环绕的,所以AC的起点和终点是两根环线。)
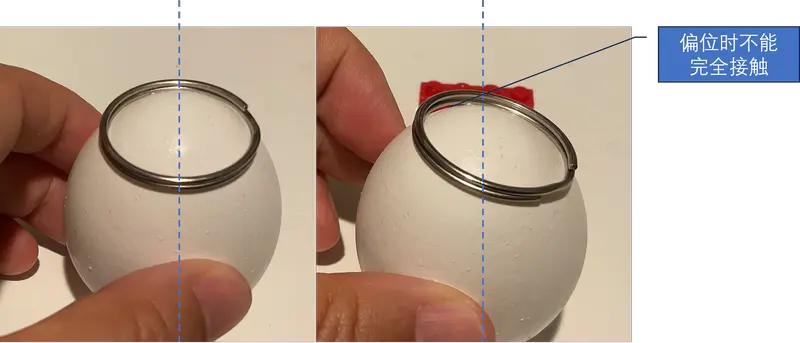
能否更少呢?也许吧,可以AC弧的起点或者终点之中选一个,但这样可能没有3个接触点稳定。比如AC弧的起点与角膜接触,而终点抬高,与角膜没有接触,那么是否有可能存在偏位的情况呢?
如果角膜的非球面程度比较大,比如,请设想一枚鸡蛋(非球面的角膜),和一个圆形的金属钥匙圈(AC弧起点),你把金属钥匙圈放在鸡蛋上,使其尽可能与鸡蛋接触密合,那么钥匙圈能够稳定存在的位置能有几个?是不是钥匙圈的平面垂直于鸡蛋对称轴?
在本教程中,我们选择使用3个接触点。
稍后我们会看到,有几个接触点,就会有几个方程出现。同样的,要求解几个方程,就需要对患者进行几类测量。多数情况下,角膜塑形镜是采用了3个接触点的方案,需要对患者进行3组测量。
比如:1. 患者角膜的K值;2. 患者的验光; 3.和戴镜后的片上验光。或者 1. 患者角膜的K值;2. 患者角膜的Q值;3.患者的验光
而角膜塑形镜的试戴片片组,通常是二维排布的,比如可能横向是K值,或者曲率半径,纵向是“降度”也就是验光结果,这样只提供了两个变量,能够解两个方程,第三个方程的解要通过片上验光来获得,或者通过角膜地形图来获得。
但如果只使用角膜塑形镜的试戴片,那么就只有2个变量参数,能够解两个方程。如果厂商说这样就够了,不需要片上验光,那么塑形镜和角膜之间,(至少在设计上),就只有两个触点。第三个,有可能碰上接触, 有可能没有,是一个开放的解。